


測量グレードの精度
高解像度のOuster OS0-128 Rev 7 LiDARセンサーと、業界をリードするFARO Connect SLAMアルゴリズムを組み合わせることで、最もアクセスが困難な空間でもセンチメートル単位の正確さで3Dマップやデジタルツインを作成することができます。正確な測定とより深い洞察を実現します。
精度
0.1% から
ドリフト
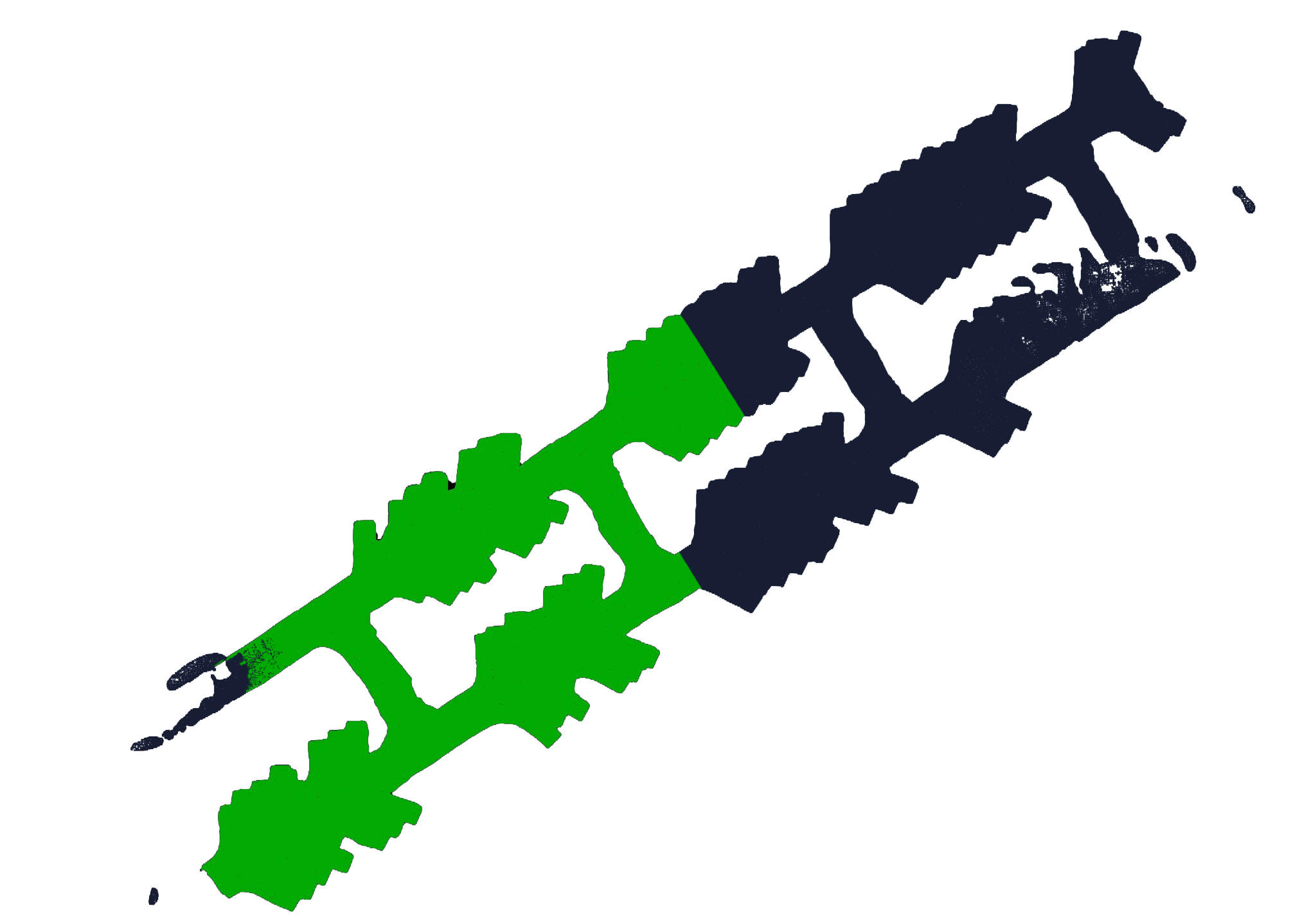
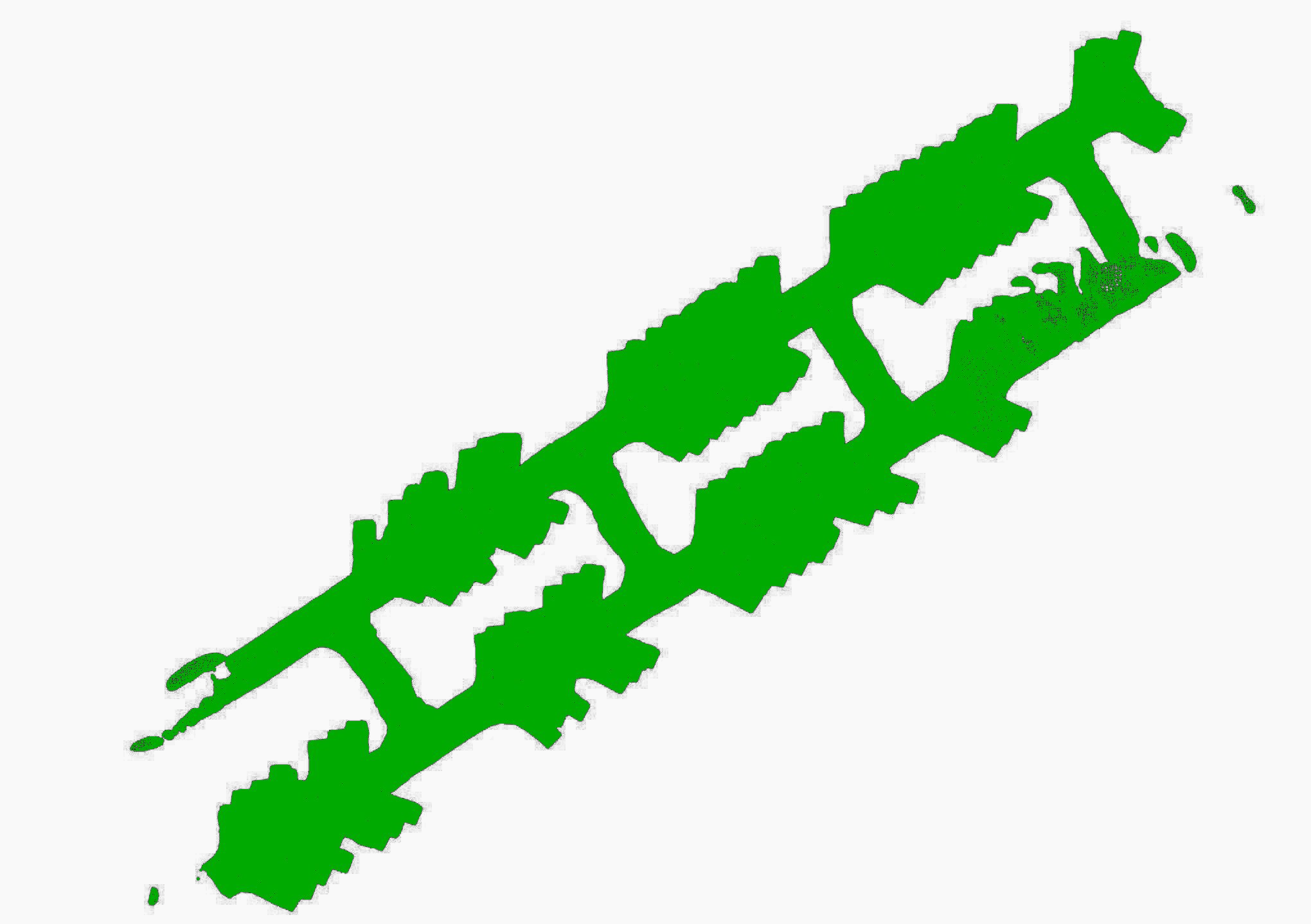
新たなマッピング機能
最新のOuster REV 7の強化版L3チップを搭載したELIOS 3は、より離れたポイントをキャプチャし、より多くの有用な視覚的特徴を検出することができます。これにより、コレクター、煙突、地下水路、地下ギャラリーなど、円筒形や対称形状の環境で3Dモデルを計算する際、SLAMアルゴリズムが収束する可能性を最大化することができます。
*精度はマッピング環境の形状によって異なる場合があります。詳細な精度レポートを確認し、あなたの用途に対する技術の適合性をさらに評価してください。
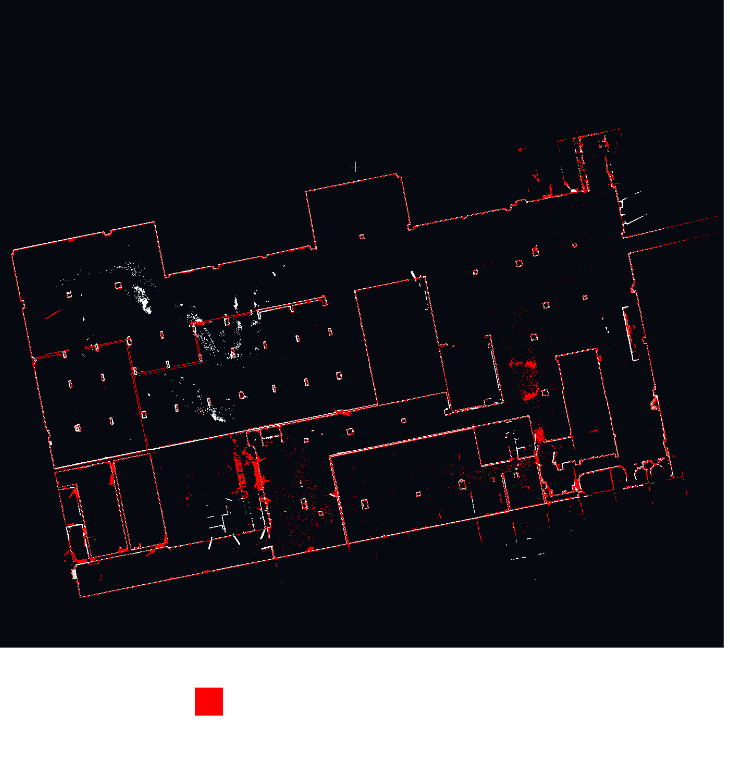
美しいポイントクラウド
安全な場所から操作し、複雑な屋内環境でも豊かで詳細なポイントクラウドをキャプチャすることができます。ELIOS 3の測量用ペイロードを使えば、困難な屋内空間の包括的なビジュアル表現を簡単に作成でき、正確なマッピングと分析が可能になります。

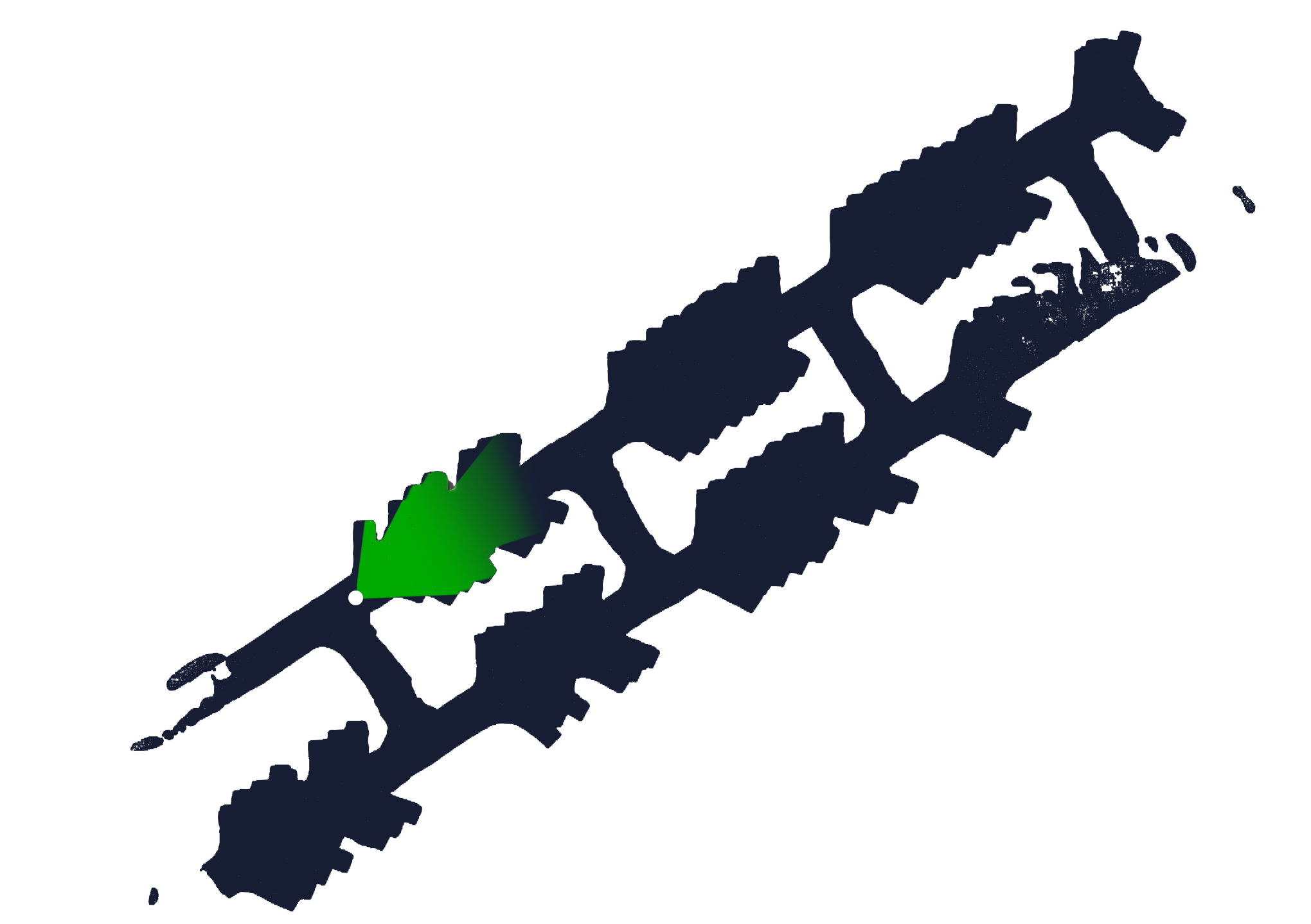
マッピング効率の飛躍的向上
センチメートル単位の精度が求められる用途では、モバイルスキャニングがトータルステーションや地上型スキャナーなどの従来の方法よりもはるかに効果的です。ELIOS 3測量用ペイロードは、100メートルの測定範囲、1,310,720ポイント/秒の密度、300メートルのトンネル(閉ループ)を1回の飛行でカバーする能力を備えています。これにより、数日かかるマッピング作業をわずか10分で完了することができます。
![]()
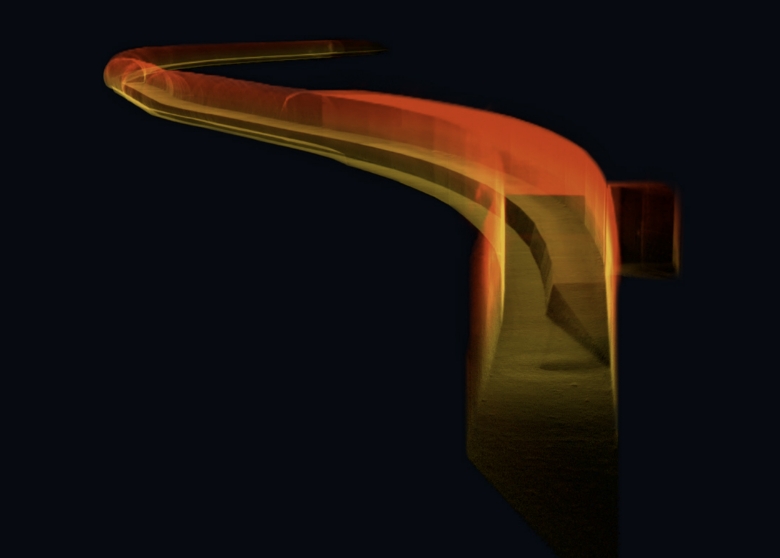
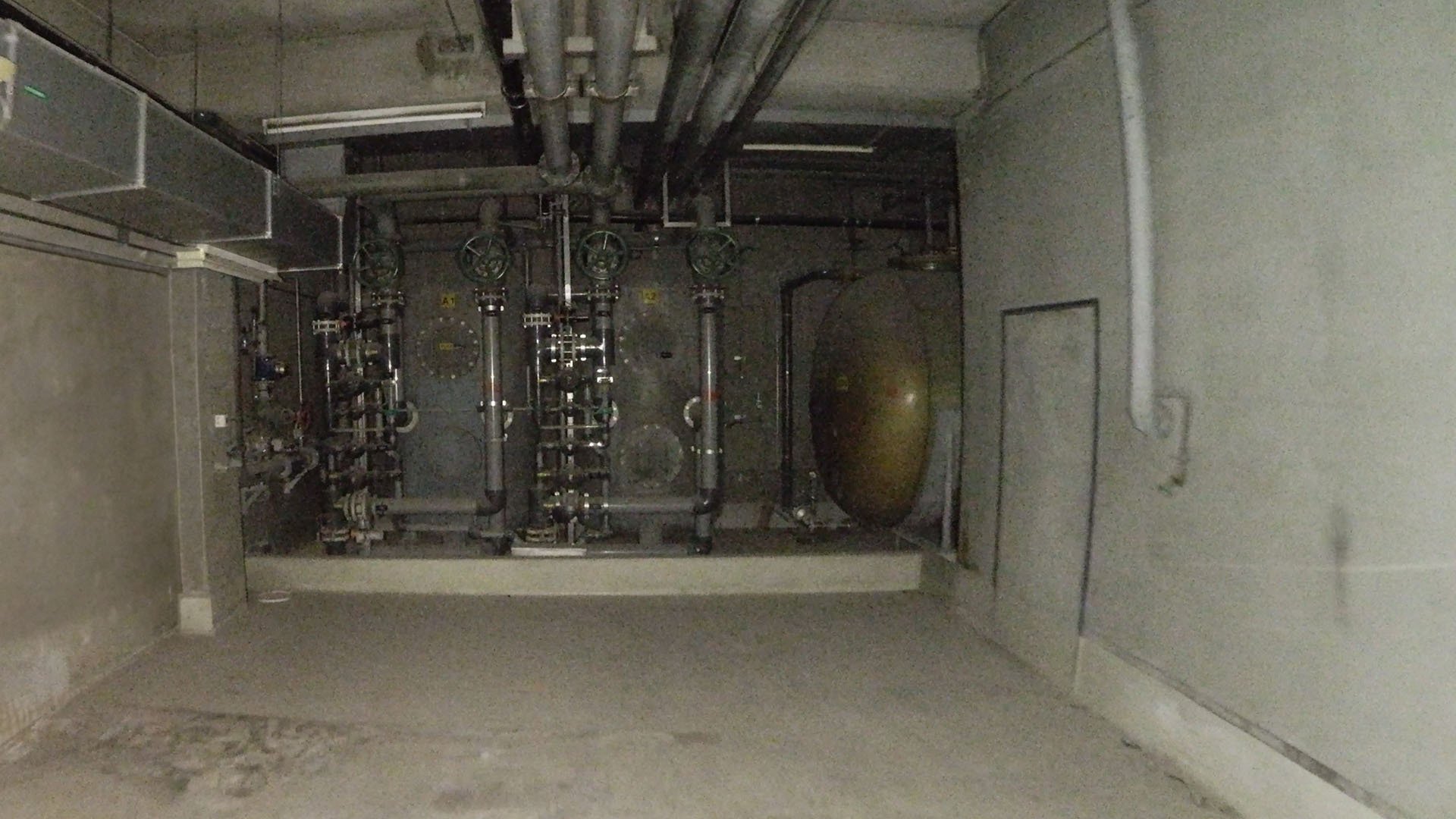
安全にアクセスできない場所でのスキャン
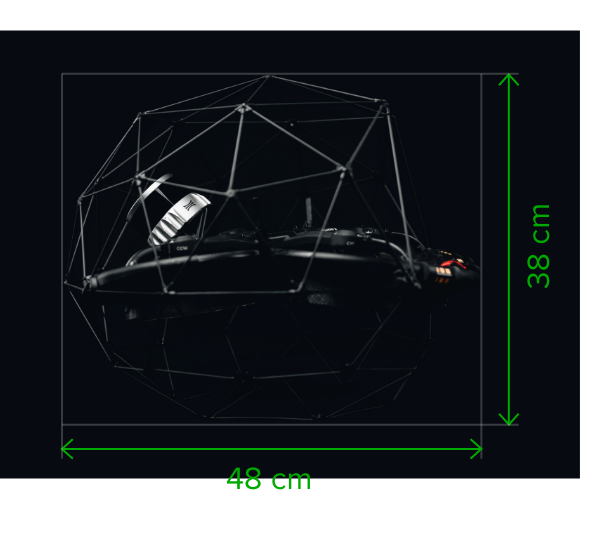
ELIOS 3と測量用ペイロードは、わずか50×50cmの開口部でも通過可能なコンパクトな設計です。固定式のケージがハードウェアを物理的に保護し、特許取得済みのフライトコントローラーとモーター設計の組み合わせにより、衝突後も飛行の安定性を回復させることができます。これにより、他の技術では対応できない複雑な環境を通り抜け、高解像度のスキャンを実現します。
データアライメント
反射ターゲットを使用して複数のポイントクラウドを結合し、1つのスキャンデータを作成。
ジオリファレンス
反射ターゲットを使用してポイントクラウドを自動的にジオリファレンス化。
ポイントクラウドのフィルタリング
外れ値の除去、表面ノイズの低減、不要なポイントの削除など、さまざまなフィルタを使用してELIOS 3の3Dモデルを洗練化。
簡単なエクスポート
処理済みのポイントクラウドデータを以下のファイル形式で出力可能:LAZ、LAS、PLY、TXT、E57。


ハードウェア
測量用ペイロードは、ELIOS 3ドローンとセット、または既存のElios 3ユーザー向けのスタンドアロンペイロードとして提供されます。
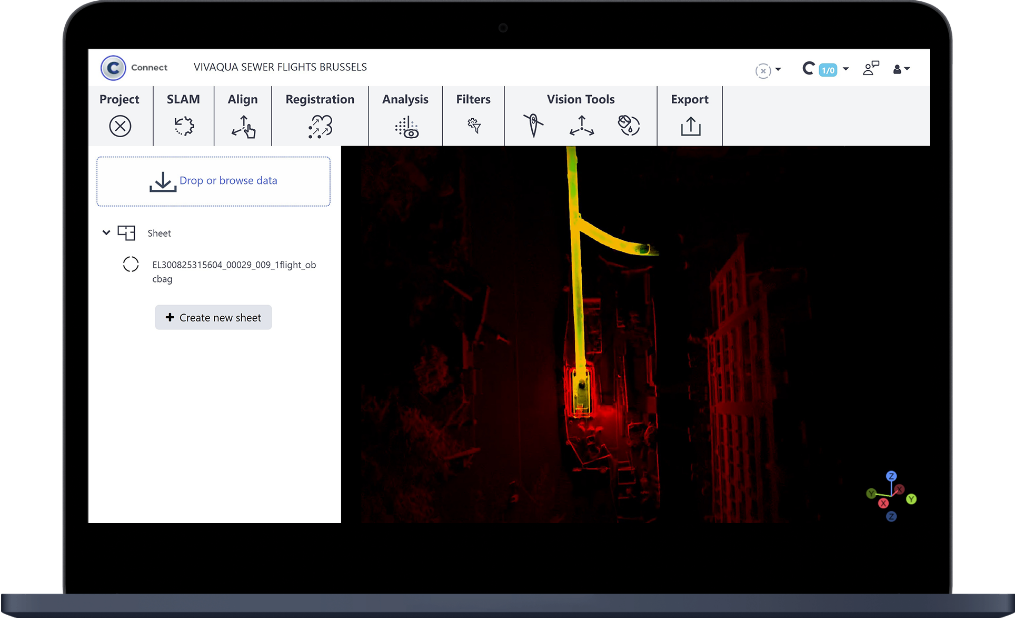
FARO Connectソフトウェア
ELIOS 3のLiDARデータの処理と管理を簡単に行うためのソフトウェアです。
反射ターゲットセット
SLAM登録ワークフローでFARO Connectが自動検出するのに最適なサイズ設計となっています
詳細なトレーニングコース
最適な飛行方法からデータ処理・登録までを網羅します。

*FlyAwareはFlyabilityのSLAMエンジンで、Elios 3の操縦アプリとInspector 4.0に使用されています。
**FARO Connectは、ELIOS 3のLiDARデータをシームレスに処理・管理するために設計されたFAROの3Dマッピングソフトウェアです。
標準構成 vs 測量構成 ![]()
デモを予約
ドローン技術が測量業務に与える影響を評価


