Elios 3 Used To 3D Map Irradiated Storage Vault At DoE Site
Benefits In A nutshell
|
Best Tool for the Job After exhaustive research, the IEC under contract with the DOE determined that the Elios 3 was the best option for their needs to 3D map the interior of an underground vault used to store nuclear waste that was built in the 1960s. |
Detailed 3D Mapping The Elios 3 produced a high quality 3D map of the vault that provided the level of detail needed for nuclear waste extraction planning. |
Speed In the first seven-minute flight the IEC was able to collect sufficient LiDAR data for 3D mapping the interior of the vault, representing the culmination of over a year of research and preparation. |
About the Mission
In the 1950s, the Department of Energy contracted with the state of Idaho to store 4,400 cubic meters (14,436 cubic feet) of nuclear waste at a secure facility called the Idaho Nuclear Technology and Engineering Center.
The waste is called calcine, and it’s a highly radioactive, granular solid made from spent nuclear fuel. This waste is stored in six underground vaults, which hold bins made to store the calcine
In 2015, the DOE’s contract came up for renewal with the state of Idaho, and the state decided to have the waste removed. This meant the DOE had to find a place to store it, and a safe method to take it out.
Nuclear Vault Inspection Challenges
The Idaho Environmental Coalition (IEC) is the organization tasked with planning the removal and movement of the calcine at the Idaho Nuclear Technology and Engineering Center.
The first major milestone in the IEC’s planning was to develop a method for removing the waste. The approach they created involves drilling holes into the top of the storage vault, then robotically welding pipes to the top of each bin before using a plasma cutter to cut into each one
These pipes will pneumatically suck out the calcine, providing a safe, remote way for it to be removed that significantly reduces the risk of radiation exposure for those doing the work.
The only problem is that the blueprints for the vaults do not provide the detail necessary for locating the holes and extraction pipes, so the IEC doesn’t know the exact layout inside each one, making it impossible to plan where to drill the holes for the extraction pipes.
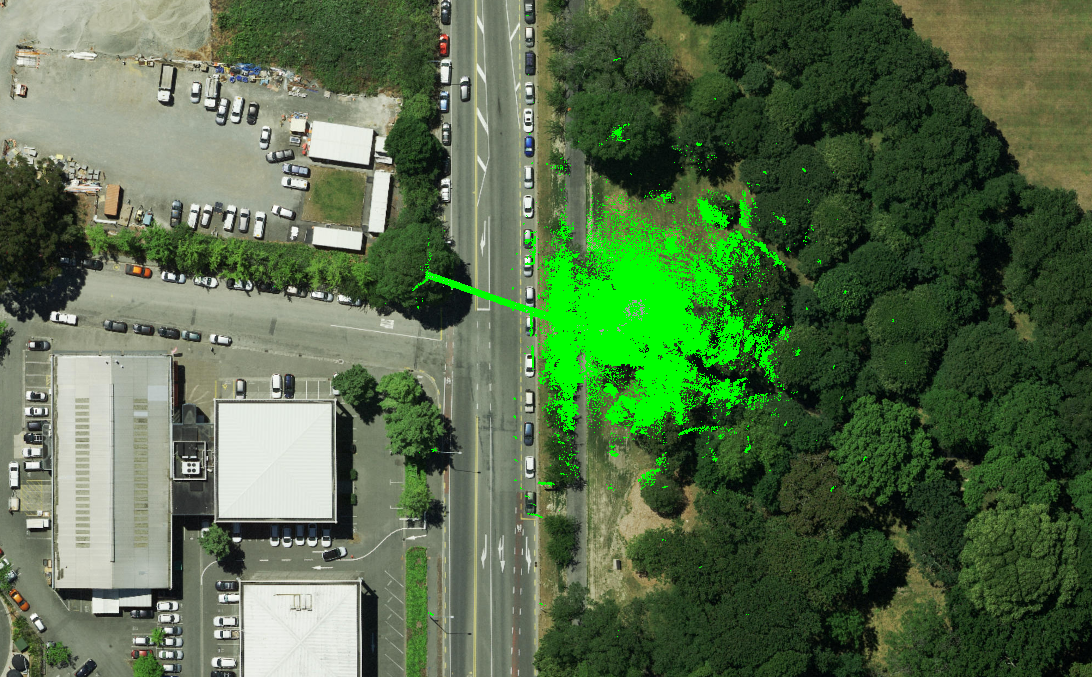
To address this need, the IEC lowered a handheld LiDAR sensor into one of the vaults on a lowering tripod to 3D map the area, but the resulting map had gaps in the data since the sensor could only be located in one place.

Incomplete 3D maps made with the handheld LiDAR data
Using a Drone for Inspecting Radioactive Environments
To find a way to create a complete 3D map of the vault’s interior the IEC systematically investigated potential solutions.
In total, it looked at five possible methods for getting the data it needed, including the use of an articulating arm, a helium-filled blimp, drilling holes into the vault, and one of Flyability’s indoor drones.
Each approach was ranked based on six criteria:
-
Available CRP project data
-
Technical risk
-
Programmatic complexity
-
Vendor input
-
Project schedule
-
Budget constraints
Following this exhaustive research, the IEC team determined that Flyability’s Elios 2 was the best tool to get the data it needed to create a 3D map of the vault’s interior.
The IEC’s original plan was to use visual data from the Elios 2 to create a 3D photogrammetric 3D model.
However, after Flyability told the IEC about the upcoming launch of the Elios 3, which is equipped with a LiDAR sensor, it decided to use the Elios 3 and LiDAR data to 3D map the vault instead of using the Elios 2 and visual data.
The IEC built a life-sized replica of the vault to test the pneumatic retrieval equipment. The replica also came in useful for training the IEC’s drone pilots, who used it to train for the LiDAR data-collection mission. In addition to training the pilots, the IEC spent months with other stakeholders in the project planning the details of the mission.
Watch this video to see highlights from the training:
Results of Drone Radiation Detection
After over a year of research, planning, and preparation the day of the data collection mission arrived.
It was windy and quite cold that day. Those planning the mission knew that the interior of the vault would be warm, presenting a temperature swing from -11 Celsius (12 Fahrenheit) to well over 38 Celsius (100 Fahrenheit) inside the vault.

These fluctuations could potentially impact the Elios 3’s battery life and performance, facts that made the pilot and supporting personnel apprehensive as they prepared to fly inside the vault.
[Related read: How Much Radiation Can the Elios 3 Handle?]
In total, about 50 people supported the mission that day. A large tent was built over the entry to the vault to ensure the drone was always flying indoors according to FAA regulations and the DOE’s requirements, and a crane was used to lift the heavy concrete cover off the vault, and then open a hatch that went directly into it.
Finally, the vault was ready for the flight. The pilot was nervous as he flew into the vault since the drone couldn’t be retrieved if it was lost.
Despite these concerns, the flight was a success, and the IEC team was able to collect all the LiDAR data it needed to map the interior of the vault after just one seven-minute flight. Given the amount of time that had been devoted to preparing the vault, a second flight was made to collect additional LiDAR data, which was also successful.

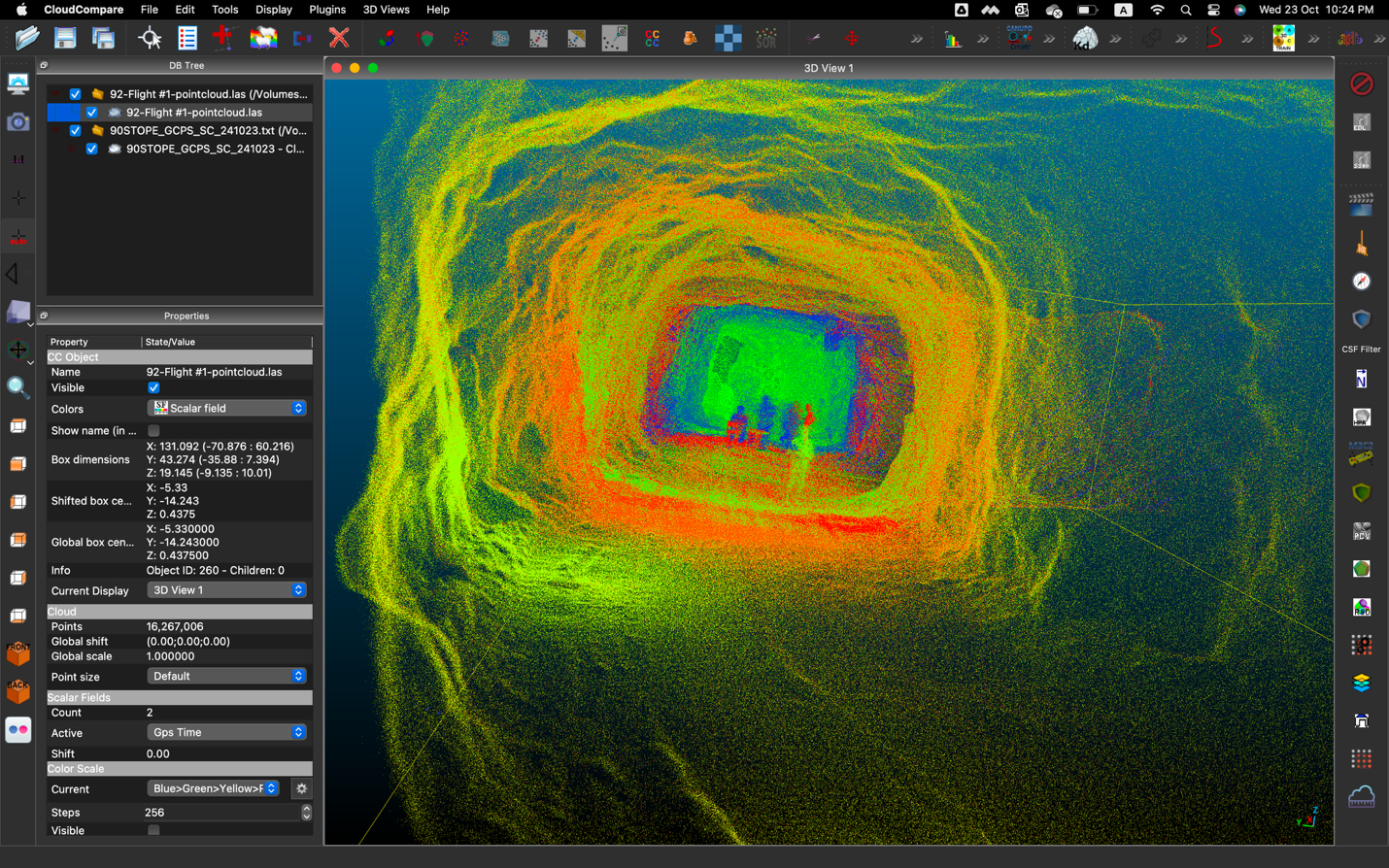
A screenshot of the 3D model made with the LiDAR data collected in the vault
Since the vault was already open, the team decided to do a second flight and collect more data.
After each mission, the LiDAR data was immediately processed using Flyability’s Inspector 4.0 software and using GeoSLAM software (now called FARO Connect).
The resulting 3D models were detailed and accurate enough to meet the IEC’s needs, and allow them to proceed with planning for the extraction of the nuclear waste from the vaults.
After over a year of planning and preparation, the IEC team got everything it needed in the first seven minute flight that it made.
Here are all the benefits the IEC team realized by using the Elios 3:
-
Best tool for the job. After exhaustive research, the IEC under contract for the DOE determined that the Elios 3 was the best option for their needs to 3D map the interior of an underground vault used to store nuclear waste.
-
Detailed 3D mapping. The Elios 3 produced a high quality 3D map of the vault that provided the level of detail needed for nuclear waste extraction planning.
-
Speed. In the first seven-minute flight the IEC was able to collect all the LiDAR data it needed to 3D map the interior of the vault, representing the culmination of over a year of research and preparation.
-
Access. The Elios 3 was able to fit through the hatch and fly into the vault, gaining crucial access to the vault for remote data collection.
-
Ease of use. Despite harsh conditions, the Elios 3 flew as expected, performing so well that it collected all the LiDAR data needed in just two seven-minute flights.

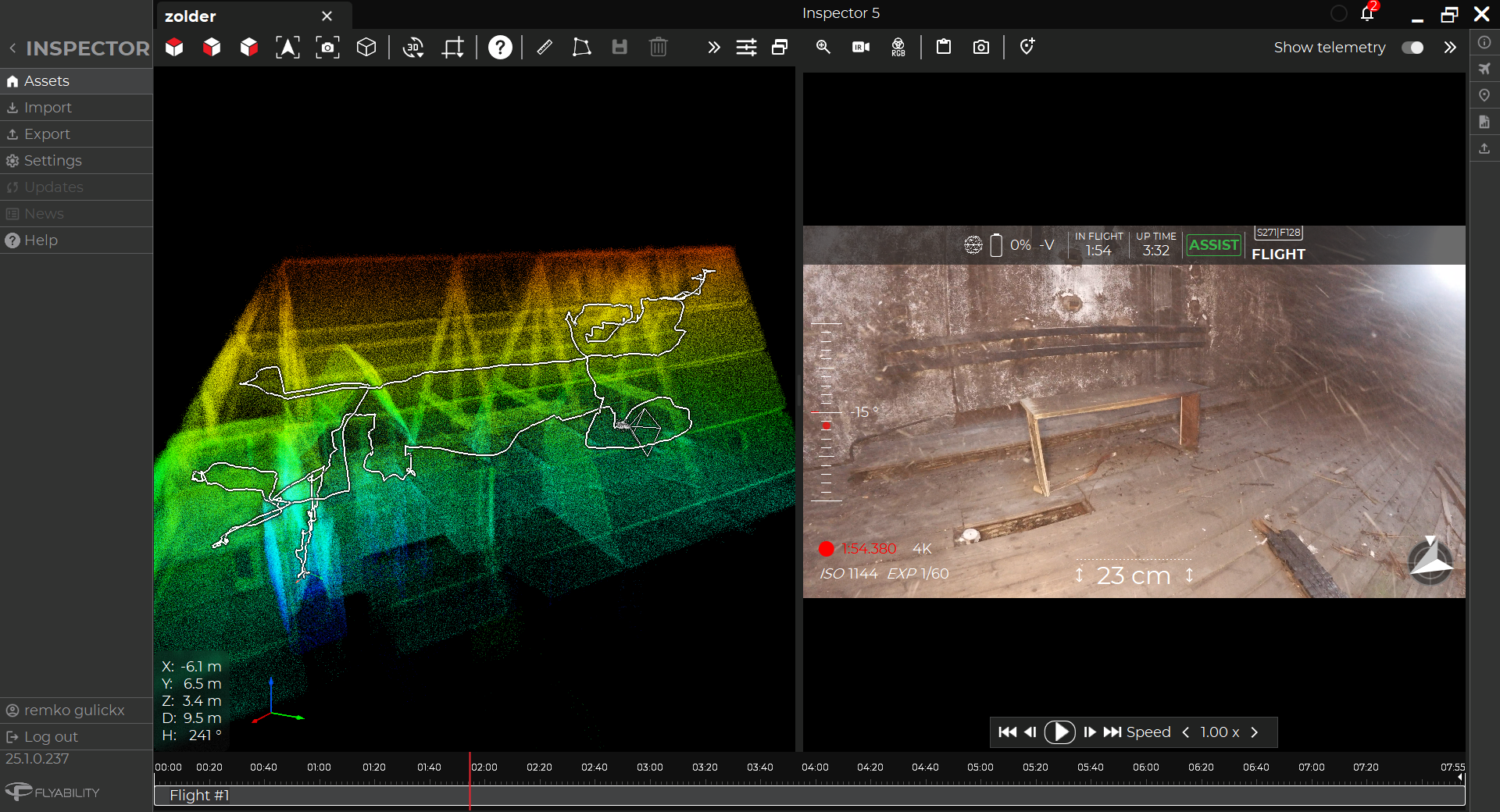
An image taken inside the vault alongside the Elios 3's 3D Live Map
After two successful LiDAR data collection flights, IEC performed a third experimental flight with one of its own dosimeters attached to the drone, making it much heavier. For reasons not fully understood, after the drone entered the vault for this flight it was not able to produce enough lift to maintain altitude. It made a slow descent to the top of one of the storage bins and became snagged on a piece of angle iron.
All attempts to free the drone failed. Before the battery died, the drone was able to transmit a maximum radiation reading of 7 Gy/h (700 rad/h) at the top of the bin. ICP subject matter experts completed a comprehensive analysis and concluded that leaving the drone on top of the storage bin presents no hazards to human safety or the integrity of the bin.
Using the Elios 3 in the Future
Now that the IEC team has successfully mapped the storage vault it will proceed with planning the removal of the calcine using the pneumatic pipe approach described above.
All six vaults will ultimately need to be emptied of their nuclear waste, an effort that will be intensive and require several more months of planning. This work is projected to begin some time in mid-2023.
Given the success of the Elios 3 for mapping the vault, the IEC and the DOE plan to use it again as other remote 3D mapping needs arise for work in confined spaces.


-Jan-16-2026-10-59-56-8006-AM.png)
.jpg)
.png)