FlyAware™ SLAM Engine

3D Reporting

Collision-Resilient
Rugged Design

SLAM-Based Stabilization

Modular Payload Bay

Close-Up Inspection Dedicated Payload

3D Live Map
![]()
Return-To-Signal

Extended
Air-Time

FlyAware™ SLAM Engine
Powered by FlyAware™.
FlyAware™ is the unique combination of computer vision, LiDAR technology, and a powerful NVidia graphic engine. Acting as a centimeter-accurate indoor GPS, it builds real-time 3D maps enabling the drone to sense its surroundings instantaneously. Today, Flyaware™ allows for groundbreaking stability and highly accurate locational awareness. Tomorrow, it is the promise of complex confined spaces inspections performed in full autonomy.

SLAM-Based Stabilization
Stone-still stability. No matter the conditions.
The all-new SLAM-based stabilization algorithm catches the tiniest unpredictable movements of the drone and instructs the flight controller to compensate for it. This allows for the drone to float in the air still as a stone even in the toughest conditions. With Elios 3, pilots from all skill levels will succeed at performing complex missions with close to no training.

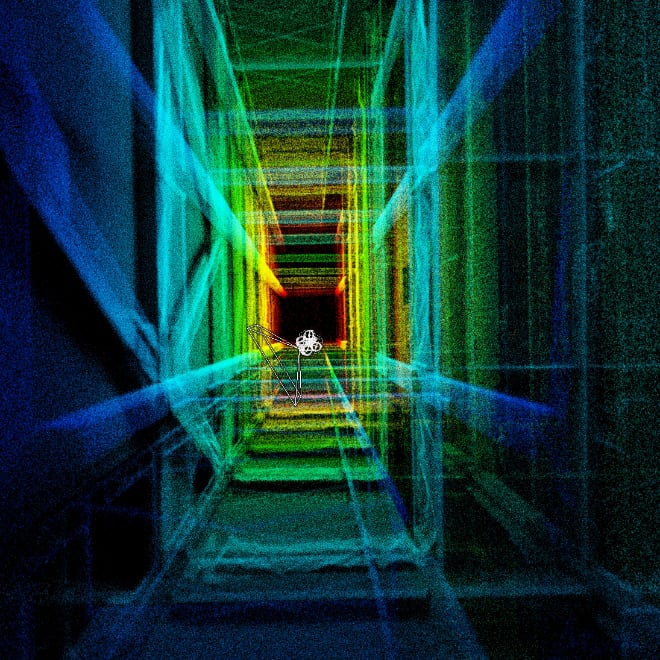
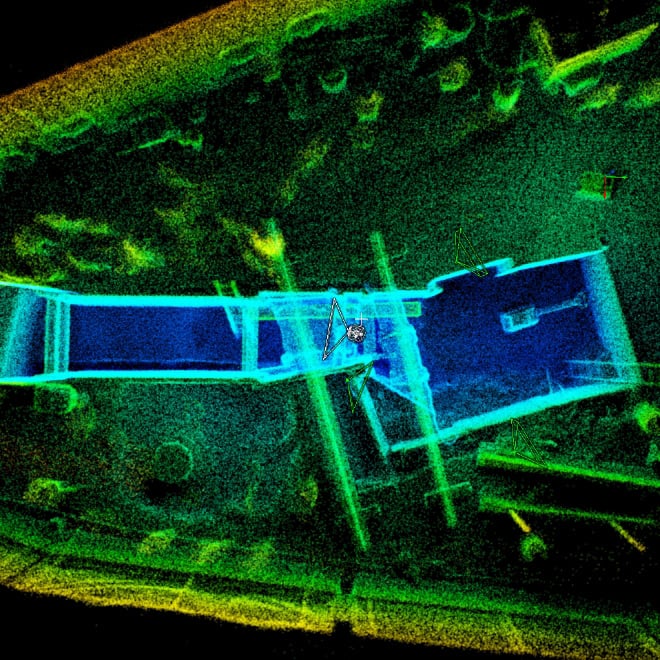
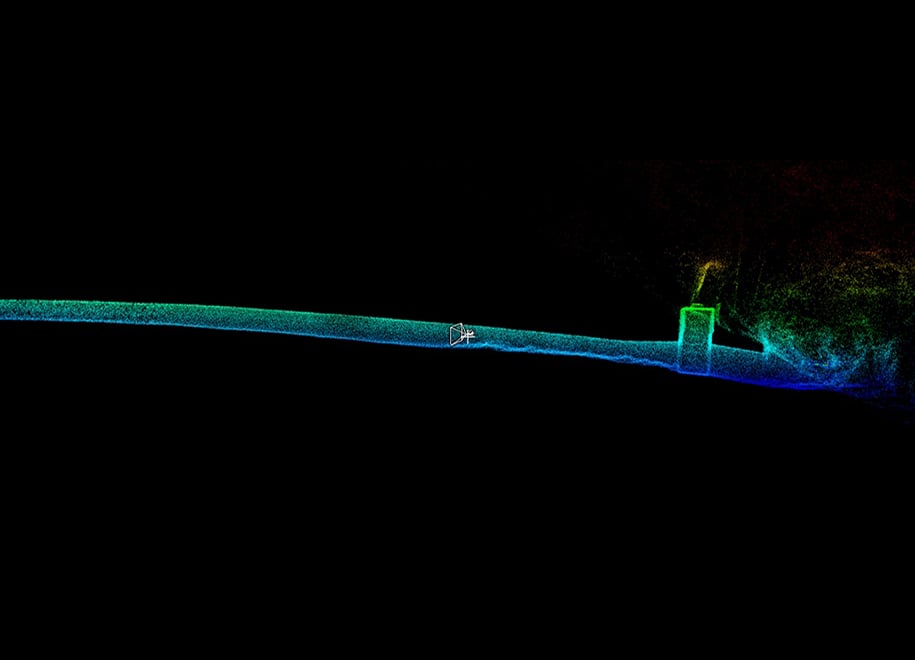
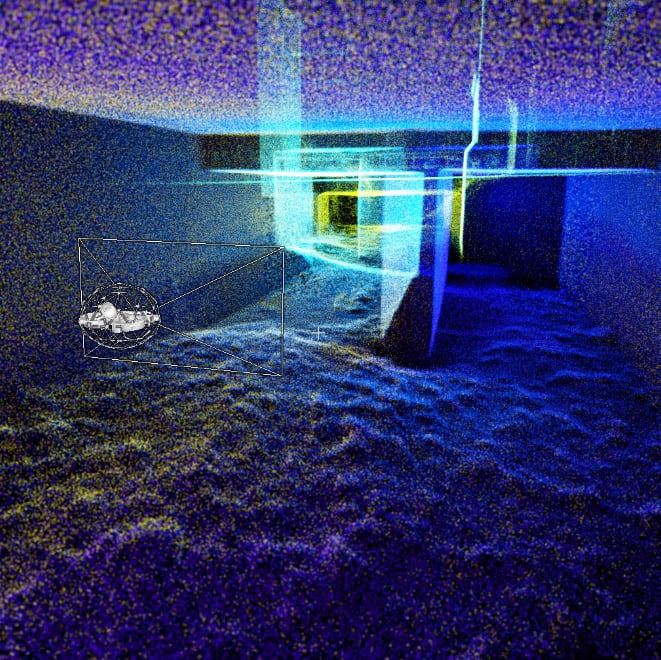
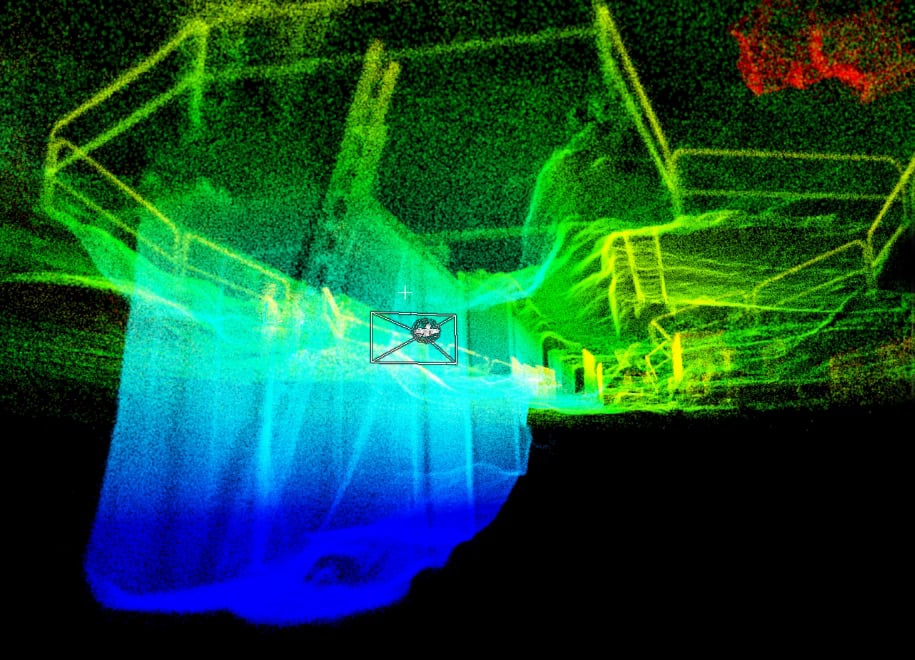
3D Live Map
Always know where you are.
The drone’s position is located precisely so the pilot can easily decide on the optimal route to safely return home.
Assess inspection coverage.
Cumulative mapping data shows the completeness of the map so you can instantly assess your inspection coverage.
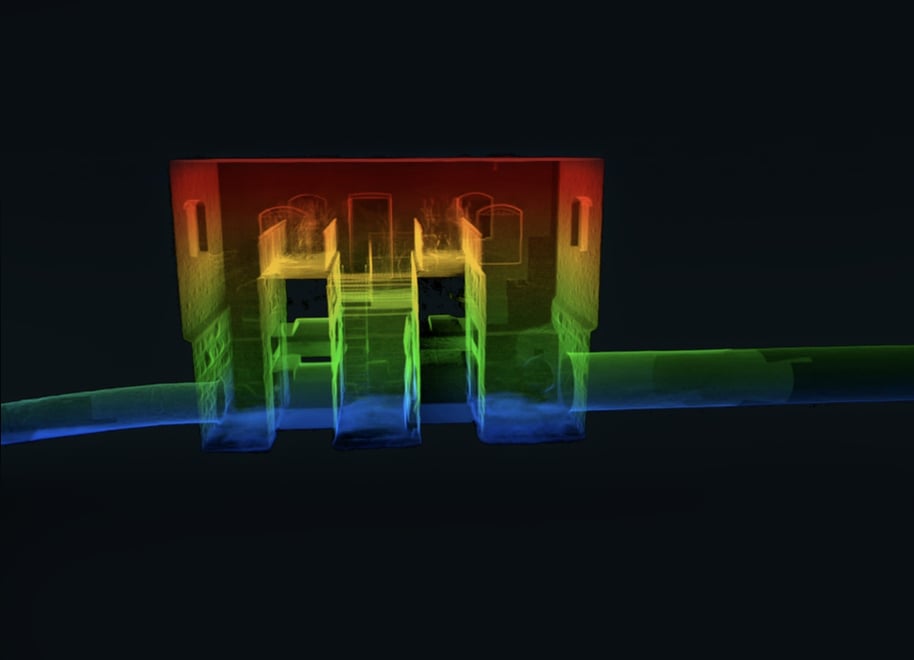
3D Reporting

Understand where to focus your maintenance efforts.
From data capture to decision making, Inspector 4.0 and Elios 3 work hand in hand to provide operational continuity, boosting your efficiency through every step of the inspection process.


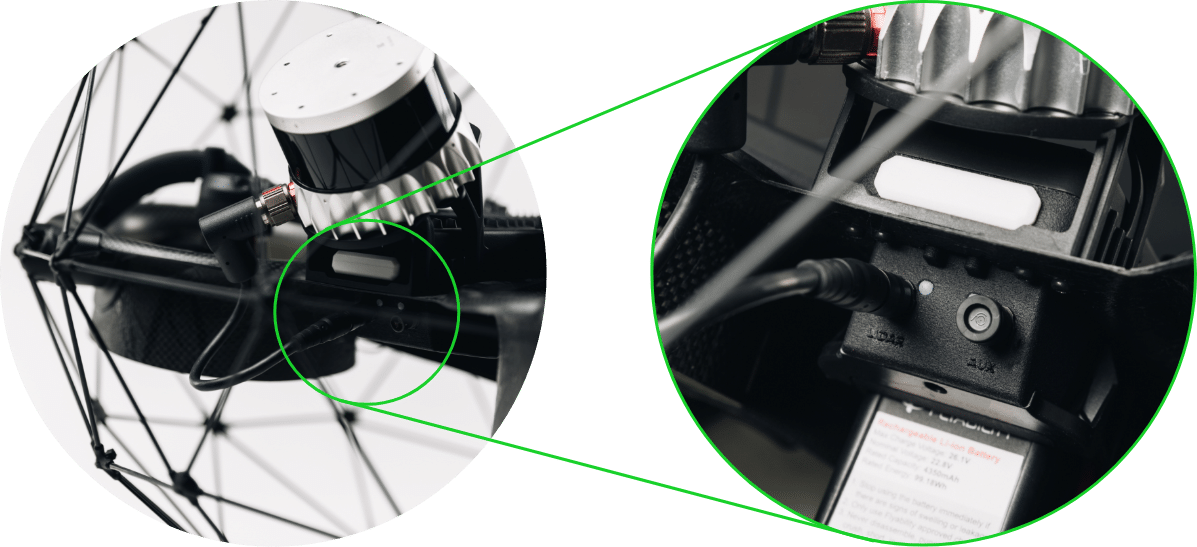
Modular Payload Bay
Return-To-Signal
Enhanced flight safety
The Elios 3 automatically monitors the live video connection. When the video feed is interrupted, the drone prompts a popup in Cockpit, offering to autonomously return along its original trajectory until the video connection is restored.
The Return-To-Signal feature provides added peace of mind for the pilot to explore further away even in marginal radio signal conditions.
Collision-Resilient Rugged Design
Ready for the tough work.
Designed after Flyabilty’s patent-pending collision-resilient flight controller, Elios 3 is fit for use in the most complex industrial settings. With its signature cage and unique reversing motors, Elios 3 is the only drone in the market that can recover from flipping upside-down without crashing. The rugged IP-44 design allows for the inspection and mapping of harsh environments without concern for water splashes and dust.
*Elios 3 is not certified IP-44 but it has been designed to comply with such rating according to the ingress protection code.
Close-Up Inspection Dedicated Payload
Supercharging data quality.
The static payload now comes with a fully unobstructed 180° field of view to a 4K camera, a thermal camera, and a distance sensor. The lighting system has been rethought from the ground-up to bring an even more powerful and homogeneous lighting experience. Thanks to the industry-leading oblique and dust-proof lighting system, looking for pitting, cracks, or build-ups becomes as natural as doing it manually with a flashlight. Elios 3 close-up inspection payload delivers stunning image quality, consistently smooth, even in the complete dark.
Ingenious lighting system
Dust-Proof 16K Lumen Lighting
Traverse dusty place without losing sight of your objective

Extended Air-Time